By now you have a working idea of what a "program" is because you have written many. Programs are particular instructions that work on specific machines.
In this course we work with an abstraction of programs: algorithms.
Informally, an algorithm is a well-defined computational procedure that takes some value(s) as input and produces some value(s) as output.
Somewhat more formally, an algorithm is a finite sequence of instructions chosen from a finite, fixed set of instructions, where the sequence of instructions satisfies the following criteria:
Discussion: What is the difference between an algorithm and a program?
Discussion: What kinds of algorithms do you think are needed when you use your smartphone (or any mobile phone for that matter?)
Here is how algorithm design is situated within the phases of problem solving in software development:
- Phase 1: Formulation of the Problem (Requirements Specification)
- To understand a real problem, model it mathematically, and specify input and output of the problem clearly.
- Phase 2: Design and Analysis of an Algorithm for the Problem (our focus)
- Step 1: Specification of an Algorithm - what is it?
- Step 2: Verification of the Algorithm - is it correct?
- Step 3: Analysis of the Algorithms - what is its time and space complexity?
- Phase 3: Implementation of the Algorithm
- Design data structures and realize the algorithm as executable code for a targeted platform (lower level abstraction).
- Phase 4: Performance Evaluation of the Implementation (Testing)
- The predicted performance of the algorithm can be evaluated/verified by empirical testing.
Algorithms are often specified in pseudocode, a mixture of programming language control structures, mathematical notation, and natural language written to be as unambiguous as possible. Examples will be given in the next lecture. In this course, we will use mostly the notation used in the book.
Why not just run experimental studies on programs? We can implement the algorithms of interest, run them on a modern computer on various input sizes, and compare the results. Why bother with all this math in the book?
There are three major limitations to experimental studies:
Formal analysis of algorithms:
These points along with the fact that algorithms are at the center of everything we do in computer science and its applications show why ICS 311 is THE central course of the ICS curriculum! Stick with us.
The computational complexity of an algorithm generally depends on the amount of information given as input to the algorithm.
This amount can be formally defined as the number of bits needed to represent the input information with a reasonable, non-redundant coding scheme.
To simplify things, we often analyze algorithms in terms of larger constant-sized data units (e.g., signed integer, floating point number, string of bounded length, or data record).
These units are a constant factor larger than a single bit, and are operated on as a unit, so the result of the analysis is the same.
The choice of algorithms and data structures has a critical impact on the following, both of which are used as measures of computational complexity:
For example, suppose you have an input size of n elements, such as n strings to be sorted in lexicographic order. Suppose further that you have two algorithms at your disposal (these algorithms will be examined in detail in the next lecture):
We will see that given n items to be sorted (it does not matter what they are as long as they are bounded by a constant size and can be compared by an < operator),
Exercise: This would be a good place for you to pause and do excercise 1.2-2, page 14:
Suppose we are comparing implementations of insertion sort and merge sort on the same machine, where c1=8 and c2=16. For which values of n does insertion sort beat merge sort?
Constants matter for small input sizes, but since constants don't grow we ignore them when concerned with the time complexity of large inputs: it is the growth in terms of n that matters.
In the example above, ignoring the constants and factoring out the common n in each term shows that the difference in growth rate is n versus lg(n). For one million items to sort, this would be a time factor of one million for insertion sort, but about 20 for merge sort.
Rather than bother with determining the constant factors for any given implementation or computer, algorithms for a problem are analyzed by using an abstract machine called a model of computation.
Many models of computation have been proposed, but they are essentially equivalent to each other (Church-Turing Thesis) as long as computation executed on them are deterministic and sequential. Commonly used models are Turing Machines and Random Access Machines (see Section 2.2 of the textbook).
In general, suppose that you have a computer of speed 107 steps per second. The running time of algorithms of the given complexity (rows) as a function of n would be:
-------------------------------------------------------------------- size n 10 20 30 50 100 1000 10000 -------------------------------------------------------------------- n 0.001ms 0.002ms 0.003ms 0.005ms 0.01ms 0.1ms 1ms n lg n 0.003ms 0.008ms 0.015ms 0.03ms 0.07ms 1ms 13ms n^2 0.01ms 0.04ms 0.09ms 0.25ms 1ms 100ms 10s n^3 0.1ms 0.8ms 2.7ms 12.5ms 100ms 100s 28h ................................................................... 2^n 0.1ms 0.1s 100s 3yr 4x10^13my inf inf --------------------------------------------------------------------
Note: "my" is million years, and 4x10^9my is greater than the estimated age of the universe!!!
Discussion: What is the difference between analysis of an algorithm and analysis of an implementation (a program)?
Discussion: What is the relationship between the efficiency of an algorithm and the difficulty of the problem to be solved by that algorithm? (We return to this in the last two topics of the semester, but see also below.)
Consider the example above: the problem of sorting a list of items. We saw two algorithms for solving the problem, one more efficient than the other. Is it possible to make a statement about the time efficiency of any possible algorithm for the problem of sorting? (We address this question in Topic #10.)
Theoretical computer science has made substantial progress on understanding the intrinsic difficulty of problems (across all possible algorithms), although there are still significant open questions (one in particular).
First of all, there are problems that we cannot solve, i.e., problems for which there does not exist any algorithm. Those problems are called unsolvable (or undecidable or incomputable), and include the Halting Problem (refer to Section 3.1 pp. 176-177 of the textbook for ICS141 & 241).
Within the problems that can be solved, there is a hierarchy of complexity classes according to how difficult they are. Difficulty is based on proofs of the minimum complexity of any algorithm that solves the problem, and on proofs of equivalences between problems (translating one into another). Here is a graphic:
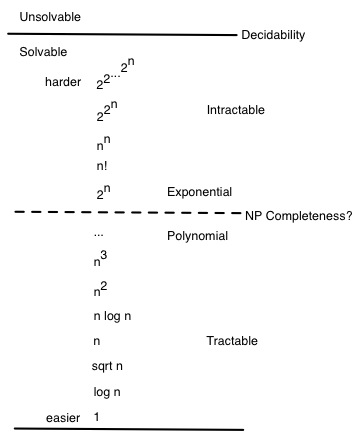
(Although algorithms can be ranked by this hierarchy, the above figure refers to problem classes, not algorithms.)
Sometimes small differences in a problem specification can make a big difference in complexity.
For example, suppose you use a graph of vertices representing cities and weighted edges between the vertices representing the distance via the best road traveling directly between the cities.
Discussion: How do these problems differ from each other? Which are easier and which are harder? Which are tractable (e.g., can be computed in polynomial time) and which are potentially intractable (e.g, require exponential time)?
Complexity theory will be the topic of our second to last lecture.
Algorithms and data structures go together. We often study algorithms in the context of Abstract Data Types (ADTs). But let's start with Data Structures.
You are already familiar with Data Structures. They are defined by:
The definition of a data structure requires that you specify implementation details such as storage structures and algorithms. It would be better to hide these details until we are ready to deal with them.
Also we may want to write a specification in terms of desired behavior (Operations) and then compare alternative storage structures and algorithms as possible solutions meeting those specifications. Data structures don't work because they already assume a given solution. Abstract Data Types or ADTs let us do this by abstracting the representations and algorithms.
An ADT is a class of instances (i.e., data objects) with a set of the operations that can be applied to the data objects.
An ADT tells us what to do instead of how to do it. This provides the specifications against which we can design different algorithms: the how part.
An ADT is specified by
ADTs can be specified in different languages:
Implementation of an ADT requires
Discussion: What is the difference between an ADT and a data structure?
Some of the material in this page was adopted with permission (and significant editing) from Kazuo Sugihara's spring 2011 Lecture Notes #02.
Dan Suthers Last modified: Fri Aug 26 02:18:27 HST 2011