ICS 311 #12: Dynamic Programming
Outline
- Problem Solving Methods and Optimization Problems
- Introducing DP with the Rod Cutting Example
- Illustrating DP with the Longest Common Subsequence Example
- Summary and Comments on Optimal Substructure
Readings and Screencasts
- Read all of CLRS Chapter 15. The focus is on the problem solving
strategy: Read the examples primarily to understand the Dynamic Programming
strategy rather than to memorize the specifics of each problem (although you
will be asked to trace through some of the algorithms).
- I have also posted a chapter by Sedgewick in Laulima. In this case, I
don't think that Sedgewick is any clearer than Cormen et al. The Rod-Cutting
example in Cormen et al. illustrates the basics of DP quite well. Also, although
usually it is easier to understand examples first, DP examples involve tedious
combinations of subproblems, so you may be better off trying to understand the
gist of the strategy first in this case.
- Screencasts 12A,
12B,
12C,
12D
(also in Laulima)
Setting the Context
Problem Solving Methods
In this course we study many well defined algorithms, including (so far)
those for ADTs, sorting and searching, and others to come to operate on
graphs. Quality open source implementations exist: you often don't need to
implement them.
But we also study problem solving methods that guide the design of algorithms
for your specific problem. Quality open source implementations may not exist for
your specific problem: you may need to:
- Understand and identify characteristics of your problem
- Match these characteristics to algorithmic design patterns.
- Use the chosen design patterns to design a custom algorithm.
Such problem solving methods include divide & conquer, dynamic
programming, and greedy algorithms. The last two are used for optimization
problems.
Optimization Problems
An optimization problem requires finding a/the "best" of a set of
alternatives (alternative approaches or solutions) under some quality metric
(which we wish to maximize) or cost metric (which we wish to minimize).
Dynamic Programming is one of several methods we will examine. (Greedy
algorithms and linear programming can also apply to optimization problems.)
Basic Idea of Dynamic Programming
Dynamic programming solves optimization problems by combining solutions to
subproblems.
This sounds familiar: divide and conquer also combines solutions to
subproblems, but applies when the subproblems are disjoint. For
example, here is the recursion tree for merge sort on an array A[1..8]. Notice
that the indices at each level do not overlap):
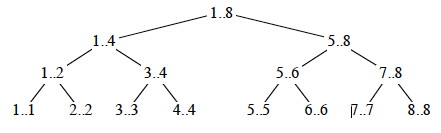
Dynamic programming applies when the subproblems overlap. For
example, here is the recursion tree for a "rod cutting" problem to be discussed
in the next section (numbers indicate lengths of rods). Notice that not only do
lengths repeat, but also that there are entire subtrees repeating. It would be
redundant to redo the computations in these subtrees.
Dynamic programming solves each subproblem just once, and saves its
answer in a table, to avoid the recomputation. It uses additional
memory to save computation time: an example of a time-memory
tradeoff.
There are many examples of computations that require exponential time without
dynamic programming but become polynomial with dynamic programming.
Example: Rod Cutting
This example nicely introduces key points about dynamic programming.
Suppose you get different prices for steel rods of different lengths. Your
supplier provides long rods; you want to know how to cut the rods into pieces in
order to maximize revenue. Each cut is free. Rod lengths are always an integral
number of length units (let's say they are feet).
Input: A length n and a table of prices pi for
i = 1, 2, ..., n.
Output: The maximum revenue obtainable for rods whose lengths sum to
n, computed as the sum of the prices for the individual rods.
We can choose to cut or not cut at each of the n-1 units of
measurement. Therefore one can cut a rod in 2n-1
ways. Obviously we do not want to test all of these possible solutions if we can
find a shortcut.
If pn is large enough, an optimal solution might require no
cuts.
Example problem instance
Here is an example price table for rods of length up to 8 feet.

Suppose we have a rod of length 4. There are 2n-1 =
23 = 8 ways to cut it up (the numbers show the price we get for each
length, from the chart above):
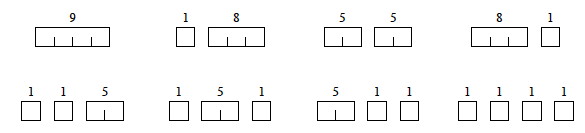
Having enumerated all the solutions, we can see that for a rod of length 4 we
get the most revenue by dividing it into two units of length 2 each:
p2 + p2 = 5 + 5 = 10.
Optimal Substructure of Rod Cutting
Any optimal solution (other than the solution that makes no cuts) for a rod
of length > 2 results in at least one subproblem: a piece of length > 1
remaining after the cut.
Claim: The optimal solution for the overall problem must include an
optimal solution for this subproblem.
Proof: The proof is a "cut and paste" proof by contradiction: if the
overall solution did not include an optimal solution for this problem, we could
cut out the nonoptimal subproblem solution, paste in the optimal subproblem
solution (which must have greater value), and thereby get a better overall
solution, contradicting the assumption that the original cut was part of an
optimal solution.
Therefore, rod cutting exhibits optimal substructure: The optimal
solution to the original problem incorporates optimal solutions to the
subproblems. This is a hallmark of problems amenable to dynamic
programming. (Not all problems have this property.)
Note that this does not necessarily mean that an optimal solution to a
subproblem will necessarily be part of the optimal solution to the overall
problem, a point we will return to. (There may be multiple optimal subproblem
solutions, but only some of which work in the overall problem.)
Continuing the example
Here is a table of ri, the maximum revenue for a rod of
length i, for this problem instance.
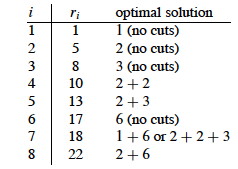
To solve a problem of size 7, find the best solution for subproblems of size
7; 1 and 6; 2 and 5; or 3 and 4. Each of these subproblems also exhibits optimal
substructure.
One of the optimal solutions makes a cut at 3cm, giving two subproblems of
lengths 3cm and 4cm. We need to solve both optimally. The optimal solution for a
3cm rod is no cuts. As we saw above, the optimal solution for a 4cm rod involves
cutting into 2 pieces, each of length 2cm. These subproblem optimal solutions
are then used in the solution to the problem of a 7cm rod.
Quantifying the value of an optimal solution
The next thing we want to do is write a general expression for the value of
an optimal solution that captures its recursive structure.
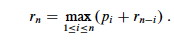
For any rod length n, we can determine the optimal revenues
rn by taking the maximum of:
- pn: the price we get by not making a cut,
- r1 + rn-1: the maximum revenue
from a rod of 1cm and a rod of n-1cm,
- r2 + rn-2: the maximum revenue
from a rod of 2cm and a rod of n-2cm, ....
- rn-1 + r1
So, rn = max (pn, r1 +
rn-1, r2 +
rn-2, .... rn-1 +
r1).
There is redundancy in this equation: if we have solved for
ri and rn-i, we don't also
have to solve for rn-i and
ri.
A Simpler Decomposition
Rather than considering all ways to divide the rod in half, leaving two
subproblems, consider all ways to cut off the first piece of length i,
leaving only one subproblem of length n - i:
We don't know in advance what the first piece of length i should be,
but we do know that one of them must be the optimal choice, so we try all of
them.
Recursive Top-Down Solution
The above equation leads immediately to a direct recursive implementation
(p is the price vector, so p[i] is the price you get for a
rod of length i; n the problem size or total length of the rod
given):
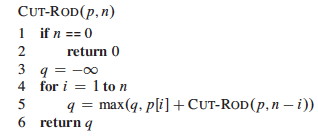
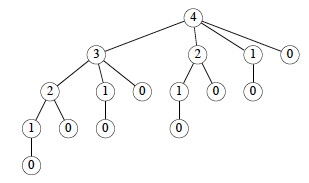
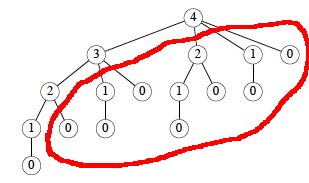
This works but is inefficient. It calls itself repeatedly on subproblems it
has already solved (circled). Here is the recursion tree for n = 4:
In fact we can show that the growth is exponential. Let T(n) be
the number of calls to Cut-Rod with the second parameter = n.
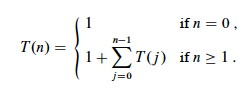
The initial 1 is for the root call, and T(j) counts the recursive
calls in line 5. This has solution 2n. (Use the inductive
hypothesis that it holds for j < n and then use formula A5 of
Cormen et al. for an exponential series.)
Dynamic Programming Solutions
Dynamic programming arranges to solve each sub-problem just once by saving
the solutions in a table. There are two approaches.
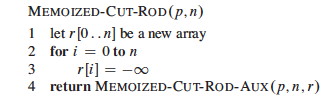
Top-down with memoization
Memoizing is remembering what we have computed previously. We modify the
recursive algorithm to store and look up results in a table r:
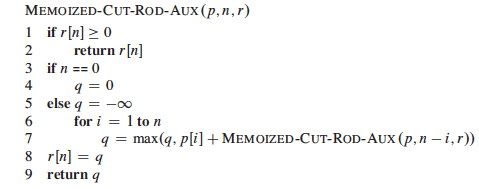
The top-down approach has the advantages that it is easy to write given the
recursive structure of the problem, and only those subproblems that are actually
needed will be computed. It has the disadvantage of the overhead of recursion
(and the algorithm is not tail-recursive, so can't be converted to iteration by
a compiler).
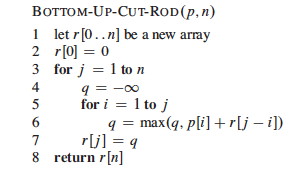
Bottom-up
One can also sort the subproblems by "size" (where size is defined according
to which problems use which other ones as subproblems), and solve the smaller
ones first.
For example, here we again use a table r, but we arrange (via the
loop in line 3) to solve the smallest problem first, then successively larger
problems so we always know the smaller solutions are available. The array
reference r[j−i] ensures that we only reference
subproblems smaller than j, the one we are currently working on.
The bottom-up approach requires extra thought to ensure we arrange to solve
the subproblems before they are needed. The bottom-up approach can be more
efficient due to the iterative implementation (and with careful analysis,
unnecessary subproblems can be excluded).
Asymptotic running time
Both the top-down and bottom-up versions run in Θ(n2)
time.
- Bottom-up: there are doubly nested loops, and the number of
iterations for the inner loop forms an arithmetic series.
- Top-down: Each subproblem is solved just once. Subproblems are
solved for sizes 0, 1, ... n. To solve a subproblem of size
n, the for loop in line 6 of Memomized-Cut-Rod
iterates n times, so over all recursive calls the total number of
iterations is an arithmetic series. (This uses aggregate analysis, covered
in a later lecture.)
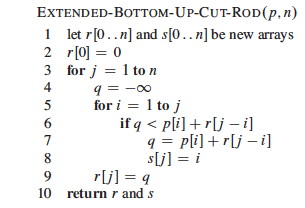
Constructing a Solution
The above programs return the value of an optimal solution. To construct the
solution itself, we need to record the choices that led to optimal
solutions. Use a table s to record the place where the optimal cut was
made (compare to Bottom-Up-Cut-Rod):
For our problem, the input data and the tables constructed are:
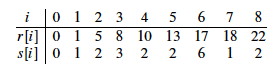
We then trace the choices made back through the table s with this
procedure:
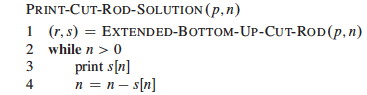
Exercise: Trace the calls made by Print-Cut-Rod-Solution(p,
8)...
Four Steps of Problem Solving with Dynamic Programming
In general, we follow these steps when solving a problem with dynamic
programming:
- Characterize the structure of an optimal solution:
- How are optimal solutions composed of optimal solutions to
subproblems?
- Assume you have an optimal solution and show how it must
decompose
- Sometimes it is useful to write a brute force solution, observe its
redundancies, and characterize a more refined solution
- Example: our observation that a cut produces one to two smaller rods
that can be solved optimally
- Recursively define the value of an optimal solution:
- Write a recursive cost function that reflects the above structure
- Example: the recurrence relation shown
- Compute the value of an optimal solution:
- Write code to compute the recursive values, memoizing or solving
smaller problems first to avoid redundant computation
- Example: Bottom-Up-Cut-Rod
- Construct an optimal solution from the computed information:
- Augment the code as needed to record the structure of the
solution
- Example: Extended-Bottom-Up-Cut-Rod and
Print-Cut-Rod-Solution
The steps are illustrated in the next example.
Example: Longest Common Subsequence
A subsequence of sequence S leaves out zero or more elements
but preserves order.
Z is a common subsequence of X and Y if
Z is a subsequence of both X and Y.
Z is a
longest common subsequence if it is a subsequence of maximal length.
The LCS Problem
Given two sequences X = ⟨ x1, ...,
xm ⟩ and Y = ⟨ y1,
..., yn ⟩, find a subsequence common to both whose
length is longest. Solutions to this problem have applications to DNA analysis
in bioinformatics. The analysis of optimal substructure is elegant.
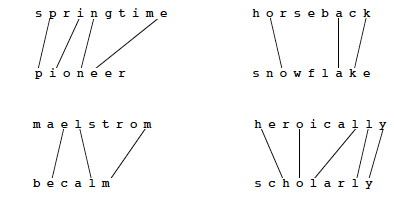
Examples
Brute Force Algorithm for LCS
For every subsequence of X = ⟨ x1, ...,
xm ⟩, check whether it is a subsequence of
Y = ⟨ y1, ..., yn ⟩,
and record it if it is longer than the longest previously found.
- There are 2m subsequences of X to check.
- For each subsequence, scan Y for the first letter. From there scan
for the second letter, etc., up to the n letters of Y.
- Therefore, Θ(n2m).
This expononential time solution involves a lot of redundant work.
- If a subsequence Z of X fails to match Y, then any
subsequence having Z as a prefix will also fail.
- If a subsequence Z of X matches Y, then there is no
need to check prefixes of Z.
Many problems to which dynamic programming applies have exponential brute
force solutions that can be improved on by exploiting redundancy in subproblem
solutions. This is why dynamic programming is such an important problem solving
method to learn.
Step 1. Optimal Substructure of LCS
The first step is to characterize the structure of an optimal solution,
hopefully to show it exhibits optiomal stubstructure.
Often when solving a problem we start with what is known and then figure out
how to construct a solution. The optimal substructure analysis takes the reverse
strategy: assume you have found an optional solution (Z below)
and figure out what you must have done to get it!
Notation:
- Xi = prefix ⟨ x1, ...,
xi ⟩
- Yi = prefix ⟨ y1, ...,
yi ⟩
Theorem: Let Z = ⟨ z1, ...,
zk ⟩ be any LCS of X = ⟨
x1, ..., xm ⟩ and Y =
⟨ y1, ..., yn ⟩. Then
- If xm = yn, then
zk = xm = yn, and
Zk−1 is an LCS of
Xm−1 and
Yn−1.
(If the last characters of
X and Y match, then these last characters are also the last
character of the LCS Z, so we can discard the last character of all
three and continue recursively on the prefix.)
- If xm ≠ yn, then
zk ≠ xm ⇒ Z is an LCS
of Xm−1 and Y.
- If xm ≠ yn, then
zk ≠ yn ⇒ Z is an LCS
of X and Yn−1.
(If the last
characters of X and Y don't match each other, then the
prefix Z must be in the substrings not involving these characters,
and furthermore we can use the last character of Z to determine
which one it lies in.)
Sketch of proofs:
(1) can be proven by contradiction: if the last characters of X and
Y are not included in Z, then a longer LCS can be constructed by
adding this character to Z, a contradiction.
(2) and (3) have symmetric proofs: Suppose there exists a subsequence
W of Xm−1 and Y (or of X and
Yn−1) with length > k. Then W is
a common subsequence of X and Y, contradicting Z being an
LCS.
Therefore, an LCS of two sequences contains as prefix an LCS of prefixes
of the sequences. That is, LCS exhibits optimal substructure: the
optimal solution to the original problem incorporates optimal solutions to the
subproblems.
We can now use this fact construct a recursive formula for the value of an
LCS. (Notice that I said "use this fact". Too often, students try to solve
each step while ignoring what they did in the previous step!)
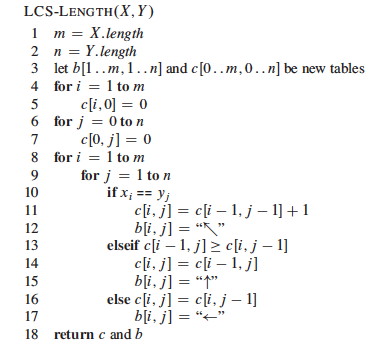
Step 2. Recursive Formulation of the Value of LCS
Let c[i, j] be the length of the LCS of prefixes
Xi and Yj. The above recursive substructure
leads to the definition of c:

Before going on, you should identify the correspondence between the parts
of the above Theorem, and the definition of c[i, j] givn
above, as you will have to make similar translations every time you solve a dynamic
programming problem!
Now we are ready to write code to find c[m, n].
Step 3. Compute the Value of the Optimal Solution to LCS
A recursive algorithm based on this formulation would have lots of repeated
subproblems, for example, on strings of length 4 and 3:
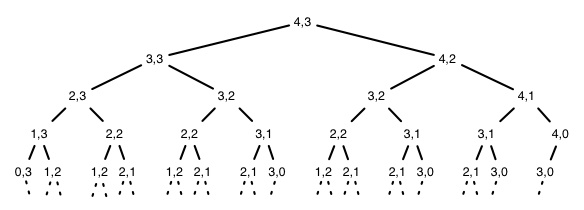
Dynamic programming avoids the redundant computations by storing the results in
a table. We use c[i,j] for the length of the LCS of
prefixes Xi and Yj (hence it must start at
0).
Try to find the correspondence betweeen the code below and the recursive
definition shown in the box. (Table b is part of the third step and
is explained next section.)
This is a bottom-up solution: Indices i and j increase through
the loops, and references to c always involve either i-1 or
j-1, so the needed subproblems have already been computed.
It is clearly Θ(mn); much better than
Θ(n2m)!
Step 4. Construct an Optimal Solution to LCS
In the process of computing the value of the optimal solution we can
also record the choices that led to this solution. Step 4 is to add
this latter record of choices and a way of recovering the optimal solution at
the end.
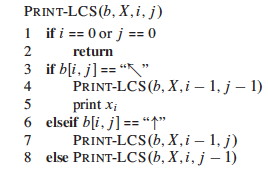
Table b[i, j] is updated above to remember whether each
entry is
- a common substring of Xi−1 and
Yj−1 (diagonal arrow), in which case the
common character xi = yj is included
in the LCS;
- a common substring of Xi−1 and Y
(↑); or
- a common substring of X and Yj−1
(←).
We reconstruct the path by calling Print-LCS(b, X, n,
m) and following the arrows, printing out characters of X that
correspond to the diagonal arrows (a Θ(n + m) traversal from
the lower right of the matrix to the origin):
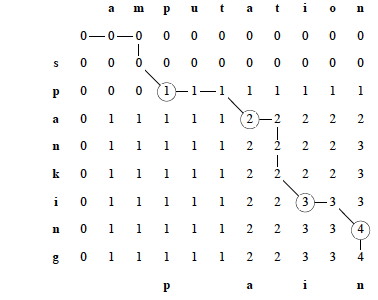
Example of LCS
What do "spanking" and "amputation" have in common? Use Print-LCS to
find out!
Other Applications
Two other applications are covered in the Cormen et al. text, and many others
in the Problems at the end of the chapter. I omit them to keep this lecture from
being too long, and trust that the student will read them in the text.
Optimizing Matrix-Chain Multiplication
Many scientific and business applications involve multiplication of chains of
matrices ⟨ A1, A2, A3,
... An ⟩. Since matrix multiplication is associative, the
matrices can be multiplied with their neighbors in this sequence in any
order. The order chosen can have a huge difference in the number of
multiplications required. For example suppose you have A, a 2x100 matrix, B
(100x100) and C (100x20). To compute A*B*C:
(A*B) requires 2*100*100 = 20000 multiplications, and results in a 2x100
matrix. Then you need to multiply by C: 2*100*20 = 4000 multiplications, for a
total of 24,000 multiplications (and a 2x20 result).
(B*C) requires 100x100x20 = 200000 multiplications, and results in a 100x20
matrix. Then you need to multiply by A: 2*100*20 = 4000 multiplications, for a
total of 204,000 multiplications (and the same 2x20 result).
So we definitely should multiply (A*B)*C not A*(B*C)!
The Matrix-Chain Multiplication problem is to determine the optimal order
of multiplications (not to actually do the
multiplications!!). For three matrices I was able to figure out the best
sequence by hand, but some problems in science, business and other areas involve
many matrices, and the number of combinations to be checked grows exponentially:
a brute force solution is Ω(2n). The CLRS textbook
develops a dynamic programming solution that runs in
Θ(n3) time, and uses Θ(n2)
space.
Planning matrix multiplication is perhaps the most "canonical" example of
dynamic programming: it is used in most introductory presentations. I chose to
present LCS instead because matrix multiplication optimization will be built
into turnkey software, and current students will more likely be interested in
bioinformatics applications
Optimal Binary Search Tree
We saw in Topic 8 that an unfortunate order of
insertions of keys into a binary search tree (BST) can result in poor
performance (e.g., linear in n). If we know all the keys in advance and
also the probability that they will be searched, we can optimize the
construction of the BST to minimize search time in the aggregate over a series
of queries. An example application is when we want to construct a dictionary
from a set of terms that are known in advance along with their frequency in the
language. (Note that this is different from constructing a balanced BST, which
is optimal only if all keys are equally likely to be searched.)
There are Ω(4n / n3/2) binary trees
with n nodes, each of which could receive a legal assignment of keys to
nodes, so obviously a brute force approach will be exponential in time. The CLRS
textbook develops a dynamic programming solution that is
Θ(n3). The student need only try problem 15.5-2 from the
Cormen et al. text (manual simulation of the algorithm) to appreciate why we
want to leave this tedium to computers!
Further Observations Concerning Optimal Substructure
To use dynamic programming, we must show that any optimal solution involves
making a choice that leaves one or more subproblems to solve, and the solutions
to the subproblems used within the optimal solution must themselves be
optimal.
The optimal choice is not known before solving the subproblems
We may not know what that first choice is. Consequently:
- To show that there is optimal substructure, we suppose that the choice
has been made, and show that the subproblems that result must also be
solved optimally. This argument is often made using a cut-and-paste proof
by contradiction.
- Then when writing the code, we must ensure that enough potential choices
and hence their supbproblems are considered that we find the optimal
first choice. This usually shows up as iteration in which we find the
maximum or minimum according to some objective function across all
choices.
Optimal substructure varies across problem domains:
How many subproblems are used in an optimal solution may vary:
- Rod Cutting: 1 subproblem (of size n - i)
- LCS: 1 subproblem (LCS of the prefix sequence(s).)
- Optimal BST: 2 subproblems (given kr has been chosen as
the root, ki ..., kr-1 and
kr+1 ..., kj)
How many choices in determining which subproblem(s) to use may vary:
- Rod cutting: n choices (for each value of i)
- LCS: Either 1 choice (if xi = yj, take
LCS of Xi-1 and Yj-1),
or 2 choices (if xi ≠ yj, check
both LCS of Xi-1 and Y, and LCS of
X and Yj-1)
- Optimal BST: j - i + 1 choices for the root
kr in ki ..., kj: see
text.
Informally, running time depends on (# of subproblems overall) x (# of choices).
- Rod Cutting: Θ(n) subproblems overall, ≤ n choices
for each ⇒ O(n2) running time.
- LCS: Θ(mn) subproblems overall; ≤ 2 choices for
each ⇒ O(mn) running time.
- Optimal BST: Θ(n2) subproblems overall;
O(n) choices for each ⇒ O(n3) running
time.
(We'll have a better understanding of "overall" when we cover amortized
analysis.)
Since optimal substructure varies across problems no one algorithm will
handle them all and you may encounter problems that have not already been
solved: you need to learn the problem solving skill of
constructing algorithms for problems.
Not all optimization problems have optimal substructure
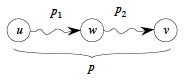
When we study graphs, we'll see that finding the shortest path between
two vertices in a graph has optimal substructure: if p =
p1 + p2 is a shortest path between u
and v then p1 must be a shortest path between u
and w (etc.). Proof by cut and paste.
But finding the longest simple path (the longest path not repeating
any edges) between two vertices is not likely to have optimal substructure.
(Longest simple path is NP-complete, a topic we will cover at the end of
the semester, so is unlikely to have any efficient solution.)
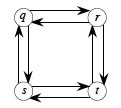
For example, q → s → t → r is the
longest simple path from q to r, but q → s is
not the longest simple path for the subproblem from q to s
(q → r → t → s is), so it
does not exhibit optimal substructure. Also, if we try to compose optimal
solutions q → s → t → r and r
→ q → s→ t to get a longest simple path from
r to t, the composed path is not even legal: the criterion of
simplicity is violated.
Dynamic programming uses optimal substructure bottom up
Although we wrote the code both ways, in terms of the order in which
solutions are found, dynamic programming first finds optimal solutions
to subproblems and then choses which to use in an optimal solution to
the problem. (Note that this is the opposite of what we do when we
prove that optimal substructure exists.) Dynamic programming applies
when one cannot make the top level choice until subproblem solutions are
known.
In Topic 13, we'll see that greedy
algorithms work top down: first make a choice that looks best,
then solve the resulting subproblem. Greedy algorithms apply when
one can make the top level choice without knowing how subproblems will be
solved.
Summary
Dynamic Programming applies when the problem has these
characteristics:
- Recursive Decomposition
- The problem has recursive structure: it breaks down into smaller problems
of the same type. This characterisic is shared with divide and
conquer, but dynamic programming is distinguished from divide and conquer
by the next item.
- Overlapping Subproblems
- The subproblems solved by a recursive solution overlap (the same
subproblems are revisited more than once). This means we can save time
by preventing the redundant computations.
- Optimal Substructure
- Any optimal solution involves making a choice that leaves one or more
subproblems to solve, and the solutions to the subproblems used within the
optimal solution must themselves be optimal. This means that optimized
recursive solutions can be used to construct optimized larger
solutions.
Note: do not make the logial error of thinking that if you have found an
optimal solution to a subproblem then it must be part of the optimal solution
to the overall problem. It may not be. The implication is in the other
direction: if we have an optimal overall solution then the subproblems must be
solved optimally as well.
Dynamic programming can be approached top-down or bottom-up:
- Top-Down with memoization:
- Write a recursive procedure to solve the problem, computing subproblems as
needed. Each time a sub-problem is encountered, see whether you have
stored it in a table, and if not, solve it and store the
solution.
- Bottom-Up:
- Order the subproblems such that "smaller" problems are solved first, so
their solutions are available in the table before "larger" problems need
them. (This ordering need not be based on literal size.)
Both have the same asympotic running time. The top-down procedure has the
overhead of recursion, but computes only the subproblems that are actually
needed. Bottom-up computes solutions to all the smaller problems before it is
known whether they are needed, but has lower overhead. Bottom-up is used the
most in practice.
We problem solve with dynamic programming in four steps:
- Characterize the structure of an optimal solution:
- How are optimal solutions composed of optimal solutions to
subproblems?
- Recursively define the value of an optimal solution:
- Write a recursive cost function that reflects the above
structure
- Compute the value of an optimal solution:
- Write code to compute the recursive values, memoizing or solving
smaller problems first to avoid redundant computation
- Construct an optimal solution from the computed information:
- Augment the code as needed to record the structure of the
solution
Wrapup
There is an online presentation focusing on LCS at
http://www.csanimated.com/animation.php?t=Dynamic_programming.
In the next Topic 13 we look at a related optimization strategy: greedy
algorithms.
Dan Suthers
Last modified: Wed Nov 11 03:32:54 HST 2020
Images are from the instructor's material for Cormen et al. Introduction to Algorithms, Third
Edition.