
A spanning tree T for a connected graph G is a tree that includes all the vertices of G: it spans the graph.
Without calling them such, we have already encountered two kinds of spanning trees in the introduction to graphs (Topic 14): those generated by breadth-first search and depth-first search. We saw that breadth-first trees are one way of finding shortest paths in a graph, and depth-first forests (a collection of spanning trees, one for each connected component) are good for uncovering the structure of a graph such as topological sort and connectivity. These were defined on unweighted graphs.
Many application areas (e.g., in communications, electronics, and transportation) require finding the lowest cost way to connect a set of objects or locations. For example, the cost may be measured in terms of currency or distance. We can model such situations with weighted graphs, introduced in Topic 14 as graphs where a real-valued number is associated with each edge. Then we want to find a spanning tree of minimum cost, i.e., minimum sum of edge weights. The algorithms we consider are designed for undirected graphs.
More formally, we can pose this as a problem on an undirected graph representation G = (V, E):
A few facts can be noted:
Therefore we call this the minimum spanning tree (MST) problem, and the generalized version the minimum spanning forest problem.
Here is an example of a minimum spanning tree (the shaded edges represent T):
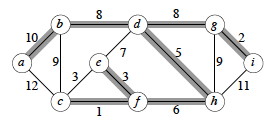
Are minimum spanning trees unique?
Look at edges (e,f) and (c,e).
We specify a generic greedy algorithm for solving the MST problem. The algorithm will be "greedy" in terms of always choosing a lowest cost edge. This generic algorithm is instantiated into two versions, Kruskal's and Prim's algorithms, which differ in how they define from what set of edges the lowest cost edge is chosen.
Let's start by noting some properties that MSTs of G = (V, E) have:
Define an edge (u,v) to be safe for A iff A ∪ {(u,v)} is also a subset of some MST for G.
(BTW, "iff" is not a spelling error: it is shorthand for "if and only if" commonly used in proofs.)
If we only add safe edges to A, once |V| − 1 edges have been added we have a MST for G. This motivates the following algorithm.
Loop Invariant: A is a subset of some MST for G
OK, great, but how do we find safe edges?
Each time we add an edge we are connecting two sets of vertices that were not previously connected by A. (Otherwise we would be forming a cycle.) A greedy algorithm might try to keep the cost down by choosing the lowest cost edge that connects previously unconnected vertices. (Perhaps we should call it a "stingy" algorithm!)
But is this greedy strategy "safe"? How do we know that after adding this edge we still have a subset of an MST?
First some definitions:
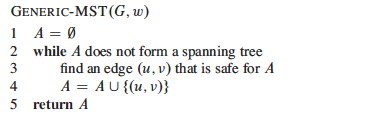
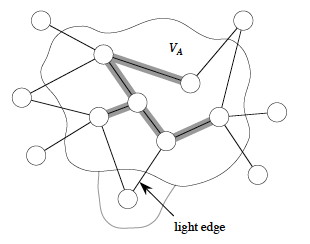
For example, consider the two graphs shown. Vertices in S are colored black and vertices in V − S are colored white. Darkened edges are in A.
Which of the two cuts (the upper or lower) respects A?
Which is the light edge crossing the cut that respects A?
Answer: (b, c), not (b, e)
This theorem defines safe edges and proves that they are indeed safe to add to the growing MST.
Let
G = (V, E) be a graph,
A be a subset of some MST for G,
(S, V − S) be a cut that respects
A, and
(u,v) be a light
edge crossing (S, V − S).
Then (u,v) is safe for A.
Paraphrased: A light edge that crosses a cut that respects A is safe for A.
Proof: Let T be a MST that includes A. Consider two cases:
Case 1: T contains (u,v). Then the theorem is proven, since A ∪ {(u,v)} ⊆ T is a subset of some MST for G.
Case 2: T does not contain (u,v). We will show that we can construct a tree T' (notice the "prime" ') that is a MST for G and that contains A ∪ {(u,v)}.
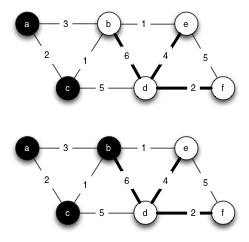
Since T is a tree it contains a unique path p between u and v. Path p must cross the cut (S, V − S) at least once (otherwise T would be disconnected). Let (x,y) be an edge of p that crosses the cut.
(Except for the dashed edge (u,v), all the edges shown in the figure are in T. A is not shown in the figure, but it cannot contain any edges that cross the cut, since the cut respects A. Shaded edges are the path p.)
Since the cut respects A, edge (x,y) is not in A.
To form T' from T: Remove (x,y). This breaks T into two components. Add (u,v). This reconnects the tree. So T' = T - {(x,y)} ∪ (u,v) is a spanning tree.
To show that T' is a minimal spanning tree: w(T') = w(T) - w(x,y) + w(u,v) ≤ w(T) since (u,v) is light.
We still need to show that (u,v) is safe for A. Since A ⊆ T and (x,y) ∉ A then A ⊆ T'. Therefore A ∪ {(u,v)} ⊆ T', a MST. ♦
A is a forest containing connected components. Initially each component is a single vertex. Any safe edge merges two of these components into one. Each component so constructed is a tree. Since an MST has exactly |V| − 1 edges, the loop in Generic-MST iterates |V| − 1 times before we are down to one component.
If C = (VC, EC) is a connected component in the forest GA = (V, A) and (u,v) is a light edge connecting C to some other component C' in GA − that is, (u,v) is a light edge crossing the cut (VC, V - VC) − then (u,v) is safe for A.
Proof: Set S = VC in the theorem. ♦
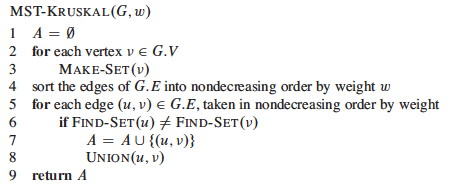
This idea of thinking in terms of components rather than vertices leads to Kruskal's algorithm ...
Kruskal's algorithm starts with each vertex being its own component, and repeatedly merges two components into one by choosing the light edge that connects them. It does this greedily (or stingily?) by scanning the edges in increasing order by weight. A disjoint-set data structure (union/find) is used to determine whether an edge connects vertices in two different components.
This algorithm has similarities with the connected components algorithm we previously saw in Topic 16:
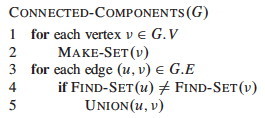
Kruskal's algorithm is the same except that edges are processed in a greedy (cost minimizing) manner as A is constructed:
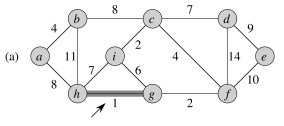
Let's start with this example. The first edge has been chosen.
Add 4 more edges (notice we could add edges of weight 2 in either order, and similarly for 4) ...
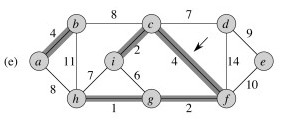
The next edge considered is not added because it would connect already connected vertices:
Keep going until the MST is constructed, and click to see the final tree.
The costs are:
If we use the forest implementation of the disjoint-set data structure with union by rank and path compression (Topic 16), the amortized cost per MAKE-SET, UNION and FIND-SET operation (across |E| operations) is O(α(V)), where α is a very slowly growing function, the inverse of Ackermann's function.
(Lemma 21.11 states that MAKE-SET in isolation is O(1), but here we must treat it as O(α(V)) since we are making a statement about the amortized cost per operation in a sequence of m operations: see section 24.1. Also, using O(α(V)) simplifies the expression below.)
Droping the lower order O(1) and substituting α(V) for the disjoint-set operations, the above list of costs sums to O((V + E)⋅α(V))+ O(E lg E).
Since G is connected, |E| ≥ |V| − 1, so we can replace V with E to simplify the first term for the disjoint-set operations, O((V + E)⋅α(V)), to O((E + E)⋅α(V)) or O(E⋅α(V)).
Furthermore, α(V) = O(lg V) = O(lg E), so O(E⋅α(V)) is O(E lg E). If we replace α(V) with O(lg E) we can then simplify the expression we started with, O((V + E)⋅α(V))+ O(E lg E), to O(E lg E).
Finally, since |E| ≤ |V|2, lg |E| = O(2 lg V) = O(lg V), so we can write the result as O(E lg V) to obtain the growth rate in terms of both |E| and |V|.
(It seemed like we already had the answer at O(E lg E): why did we keep going? Because it is usually a good idea to include both V and E when giving growth rates for graph algorithms, unless one of them can be strictly limited to the other. Also, shortly we will see that O(E lg V) enables comparison to Prim's algorithm.)
This algorithm is also a greedy (stingy) algorithm, but it builds one tree, choosing the lightest edge incident on the growing tree, so the set A is always a tree. The tree is initialized to be a single vertex, designated r for root.
At each step it finds a light edge crossing the cut (VA, V - VA), where VA= vertices that are incident on A, and adds this edge to A. (Initially, A = {} and VA = {r}.)
(Edges of A are shaded in the illustration.)
To find the light edge quickly we use a priority queue Q (Topic 09):
The edges of A will form a rooted tree with root r, given as input (r can be any vertex).
This code differs from the CLRS textbook version in having explicit calls to the heap methods (so that we know how to account for them in the runtime analysis):
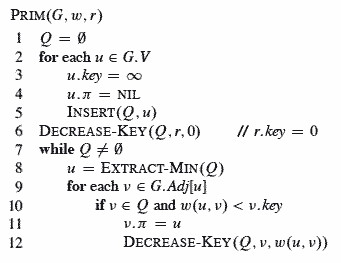
Notice that it is possible for the last if to execute multiple times for a given v. In other words, we may find an edge reaching vertex v, but before we choose to use it (because other edges have lower key values), we find another edge reaching v for lower cost (key value). Watch for this situation in the example below.
Let's try it with this graph. The first three steps are shown. Every time a vertex is dequed, it is colored black and the cost of all adjacent vertices are updated as needed. For example, when a is dequeued, the cost of b is updated from infinite to 4, and the cost of h is updated from infinite to 8. Then when b is dequeued, its neighbors are updated and so on.
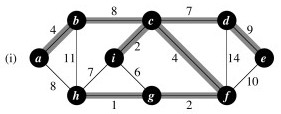
Did you see where a vertex's key was lowered from one non-infinite value to another? Which one?
Now finish it and click on the image to see final solution.
Performance depends on the priority queue implementation. With a binary heap implementation (Topic 09), the costs are:
The sum of the dominating terms is O(V lg V) + O(E lg V).
If G is connected, |E| ≥ |V| − 1, so we can replace O(V lg V) with O(E lg V), and the total is O(E lg V).
This is asymptotically the same as Kruskal's algorithm.
A faster implementation of O(E + V lg V) is possible with Fibonacci Heaps, as explained in CLRS, but the implementation is complex and rarely used, and we have not studied it, so we should treat Prim's algorithm as O(E lg V).