"Although this may seem a paradox, all exact science is dominated by the idea of approximation." − Bertrand Russell

Well, your boss understands it's a hard problem, but he still wants you to do something about it! After all, we can't abandon the lucrative iThingy market! Is there a way to configure iThingies to be "good enough" without using a huge amount of computer time delaying the orders?
There are three broad approaches to handing NP-Complete or NP-Hard problems in practice:
Let C be the cost of a solution found for a problem of size n and C* be the optimal solution for that problem.
Then we say an algorithm has an approximation ratio of ρ(n) (that's "rho" so we say "rho of n" or just "rho n", just like we say "theta n") if
C/C* ≤ ρ(n) for minimization problems: the factor by which the actual solution obtained is larger than the optimal solution.
C*/C ≤ ρ(n) for maximization problems: the factor by which the optimal solution is larger than the solution obtained
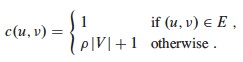
The CLRS text says both of these at once in one expression shown to the right. The ratio is never less than 1 (perfect performance).
An algorithm that has an approximation ratio of ρ(n) is called a ρ(n)-approximation algorithm.
For example, if the ratio is 2 we have a 2-approximation algorithm, meaning it gives solutions that never cost more than twice that of optimal if it is a minimization problem, or never provide less than half the optimal value if it is a maximization problem.
An approximation scheme is a parameterized approximation algorithm that takes an additional input ε > 0 and for any fixed ε is a (1+ε)-approximation algorithm.
An approximation scheme is a polynomial approximation scheme if for any fixed ε > 0 the scheme runs in time polynomial in input size n. (We will not be discussing approximation schemes; just wanted you to be aware of the idea. See CLRS section 35.5)
By definition, if a problem A is NP-Complete then if we can solve A in O(f(n)) then we can solve any other problem B in NP in O(g(n)) where g(n) is polynomially related to f(n). (A polynomial time reduction of the other problems to A exists.)
So, if we have a ρ(n)-approximation algorithm for the optimization version of A, does this mean we have a ρ(n)-approximation algorithm for the optimization version of any problem B in NP? Can we just use the same polynomial time reduction, and solve A, to get a ρ(n)-approximation for B?
That would be pretty powerful! Below we show we have a 2-approximation algorithm for NP-Hard Vertex Cover: so is 2-approximation possible for the optimization version of any problem in NP? See problem 35.1-5 in CLRS for an example: we'll leave this question for later discussion ...
We examine two examples in detail before summarizing other approximation strategies.
Recall that a vertex cover of an undirected graph G = (V, E) is a subset V′ ⊆ V such that if (u, v) ∈ E then u ∈ V′ or v ∈ V′ or both (there is a vertex in V′ "covering" every edge in E).
The optimization version of the Vertex Cover Problem is to find a vertex cover of minimum size in G.
We previously showed by reduction of CLIQUE to VERTEX-COVER that the corresonding decision problem is NP-Complete, so the optimization problem is NP-Hard.
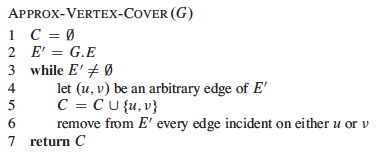
Vertex Cover can be approximated by the following surprisingly simple algorithm, which iterately chooses an edge that is not covered yet and covers it using both incident vertices:

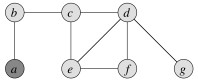
Suppose we have this input graph:
Suppose then that edge {b, c} is chosen. The two incident vertices are added to the cover and all other incident edges are removed from consideration:

Iterating now for edges {e, f} and then {d, g}:

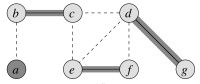
The resulting vertex cover is shown on the left and the optimal vertex on the right (the lighter colored vertices are in the cover:

Would the approximation bound be tighter if we always chose an edge incident on the highest degree vertex remaining? Try it on this example! (This will require that you take out a pencil and paper. Don't cheat yourself by being lazy.) See 35.1-3.
How good is the approximation? We can show that the solution is within a factor of 2 of optimal.
Theorem: Approx-Vertex-Cover is a polynomial time 2-approximation algorithm for Vertex Cover.
Proof: Vertex Cover: The algorithm constructs a vertex cover because it loops until every edge in E has been covered. (This can be made more formal with a loop invariant proof.)
Polynomial: The algorithm has O(|E|) iterations of the loop, and (using aggregate analysis, Topic 15) across all loop iterations, O(|V|) vertices are added to C. Therefore it is O(E + V), so is polynomial.
2-Approximation: It remains to be shown that the solution is no more than twice the size of the optimal cover. We'll do so by finding a lower bound on the optimal solution C*.
Let A be the set of edges chosen in line 4 of the algorithm. Any vertex cover must cover at least one endpoint of every edge in A.
No two edges in A share a vertex, because for any two edges one of them must be selected first (line 4), and all edges sharing vertices with the selected edge are deleted from E′ in line 6, so are no longer candidates on the next iteration of line 4. Therefore, in order to cover A, the optimal solution C* must have at least as many vertices as edges in A:
| A | ≤ | C* |
Since each execution of line 4 picks an edge for which neither endpoint is yet in C and line 5 adds these two vertices to C, then we know that
| C | = 2 | A |
Therefore:
| C | ≤ 2 | C* |
That is, |C| cannot be larger than twice the optimal, so is a 2-approximation algorithm for Vertex Cover.
This is a common strategy in approximation proofs: we don't know the size of the optimal solution, but we can set a lower bound on the optimal solution and relate the obtained solution to this lower bound.
Can you come up with an example of a graph for which Approx-Vertex-Cover always gives a suboptimal solution?
Suppose we restrict our graphs to trees. Can you give an efficient greedy algorithm that always finds an optimal vertex cover for trees in linear time?

In the Traveling Salesperson Problem (TSP) we are given a complete undirected graph G = (V, E) (representing, for example, routes between cities) that has a nonnegative integer cost c(u, v) for each edge {u, v} (representing distances between cities), and must find a Hamiltonian cycle or tour with minimum cost. We define the cost of such a cycle A to be the sum of the costs of edges:
The unrestricted TSP is very hard, so we'll start by looking at a common restriction.
In many applications (e.g., Euclidean distances on two dimensional surfaces), the TSP cost function satisfies the triangle inequality:
c(u, v) ≤ c(u, w) + c(w, v), ∀ u, v, w ∈ V.
Essentially this means that it is no more costly to go directly from u to v than it would be to go between them via a third point w.
The triangle inequality TSP is still NP-Complete, but there is a 2-approximation algorithm for it. The algorithm finds a minimum spanning tree (Topic 17), and then converts this to a low cost tour:
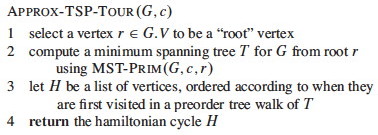
(Conjecture to consider while you read the proof below: Any MST algorithm would work. We'd just have to pick a vertex arbitrarily to be the root from which the preorder walk commences.)
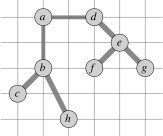
Suppose we are working on the graph shown below to the left. (Vertices are placed on a grid so you can compute distances if you wish.) The MST starting with vertex a is shown to the right.
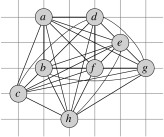
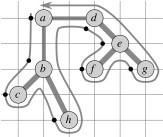
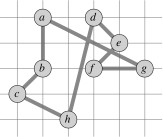
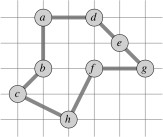
Recall from early in the semester (or ICS 241) that a preorder walk of a tree visits a vertex before visiting its children. Starting with vertex a, the preorder walk visits vertices in order a, b, c, h, d, e, f, g. This is the basis for constructing the cycle in the center (cost 19.074). The optimal solution is shown to the right (cost 14.715).
Theorem: Approx-TSP-Tour is a polynomial time 2-approximation algorithm for TSP with triangle inequality.
Proof: Tour: The algorithm is correct because it produces a Hamiltonian circuit, which is a tour.
Polynomial: The algorithm is polynomial time because the most expensive operation is MST-Prim, which can be computed in O(E lg V) (see Topic 17 notes), while a preorder walk is O(V) = O(E) for a tree.
2-Approximation: Let T be the spanning tree found in line 2, H be the tour found and H* be an optimal tour for a given problem.
If we delete any edge from H*, we get a spanning tree that can be no cheaper than the minimum spanning tree T, because H* has one more (nonegative cost) edge than T:
c(T) ≤ c(H*)
Consider the cost of the full walk W that traverses the edges of T exactly twice starting at the root. (For our example, W is ⟨{a, b}, {b, c}, {c, b}, {b, h}, {h, b}, {b, a}, {a, d}, ... {d, a}⟩.) Since each edge in T is traversed twice in W:
c(W) = 2 c(T)
This walk W is not a tour because it visits some vertices more than once, but we can skip the redundant visits to vertices once we have visited them, producing the same tour H as in line 3. (For example, instead of ⟨{a, b}, {b, c}, {c, b}, {b, h}, ... ⟩, go direct: ⟨{a, b}, {b, c}, {c, h}, ... ⟩.)
By the triangle inequality, which says it can't cost any more to go direct between two vertices,
c(H) ≤ c(W)
Noting that H is the tour constructed by Approx-TSP-Tour, and putting all of these together:
c(H) ≤ c(W) = 2 c(T) ≤ 2 c(H*)
So, c(H) ≤ 2 c(H*), and thus Approx-TSP-Tour is a 2-approximation algorithm for TSP. (The CLRS text notes that there are even better solutions, such as a 3/2-approximation algorithm.)
Does this proof depend in an essential way on the algorithm by which the MST was constructed, or will any polynomial MST algorithm work?
Another algorithm that is a 2-approximation on the triangle inequality TSP is the closest point heuristic, in which one starts with a trivial cycle including a single arbitrarily chosen vertex, and at each iteration adds the next closest vertex not on the cycle until the cycle is complete.
Above we got our results using a restriction on the TSP. Unfortunately, the general problem is harder ...
Theorem: If P ≠ NP, then for any constant ρ ≥ 1 there is no polynomial time approximation algorithm with ratio ρ for the general TSP.
The proof by contradiction shows that if there were such an approximation one can solve instances of Hamiltonian Cycle in polynomial time. Since Hamiltonian Cycle is NP-Complete, then P = NP. The proof uses a reduction similar to that used in Topic 24, where edges for TSP graph G′ are given unit cost only if the corresponding edge is in the edge-set E for the Hamiltonian Cycle problem graph G:
For any ρ(n) ≥ 1, a TSP approximation algorithm will choose the edges of cost 1 in G′ (because to include even one edge not in E would exceed the approximation ratio), thereby finding a Hamiltonian Cycle in G if such a cycle exists. (See text for details.)
Does this answer the question I posed earlier?
Computer Scientists Break Traveling Salesperson Record, Quanta Magazine, October 8, 2020: "... in 1976, Nicos Christofides came up with an algorithm that efficiently finds approximate solutions — round trips that are at most 50% longer than the best round trip." Two faculty asked "a brilliant new graduate student named Nathan Klein who had double-majored in math and cello" to try to improve on this. A few years later, "Karlin, Klein and Oveis Gharan have proved that an algorithm devised a decade ago beats Christofides’ 50% factor, though they were only able to subtract 0.2 billionth of a trillionth of a trillionth of a percent", breaking a theoretical logjam.
Holy cow. Several years to get 0.000000000000000000000000000000002% better!!! At least he got a PhD out of it!
Now you can probably guess that the answer to the question I raised in the beginning concerning transfer of ρ(n)-approximation across problem reductions is negative: we have a 2-approximation algorithm for vertex cover, but not for the generalized TSP, even though they are reducible to each other (both being NP Complete). Clearly, ρ(n)-approximation does not transfer.
Thus, even within NP, some problems are harder than others in terms of whether they allow approximations.
The proof technique of reduction to NP-Complete problems has been used to organize the class NPC into problems that can be polynomially approximated and those that cannot be under the assumption that P ≠ NP. Further discussion can be found in Garey and Johnson (1979).
You might think about this: Why aren't approximation properties carried across problem reductions?
In addition to the above custom designed approximation solutions, various general strategies (in the sense that they can be applied to more than one problem, but not necessarily all problems) for approximations have been found, three of which we review briefly here.
Sometimes it is possible to obtain an adequate approximation ratio with a greedy approach.
Here is a brief example, covered in more detail in CLRS 3.5.3.Suppose we are given a finite set of elements X, and a "family" or set of subsets F such that every element of X belongs to at least one set in F. That is, F covers X. But do we need all of the subsets in F to cover X?
The SET-COVER problem is to find a minimum subset of F (minimum number of subsets) that cover all of X (the union of the subsets is X).
VERTEX-COVER can be reduced to SET-COVER, so the latter is NP-Complete.
This problem has applications to finding the minimum resources needed for a situation, such as the minumum number of people (represented by the subsets of F) with the skills (represented by members of X) needed to carry out a task or solve a problem.
A greedy approximation algorithm for SET-COVER is as follows:
Greedy-Set-Cover (X, F)
1 U = X // the remaining elements we need to cover
2 C = {} // the subset of F we have chosen
3 while U != {}
4 select an S ∈ F that maximizes |S ∩ U|
5 U = U − S // we are now covering the elements of S ...
6 C = C ∪ {S} // ... by adding S to our chosen subsets
7 return C
CLRS show that Greedy-Set-Cover can be implemented in polynomial time, and furthermore that it is an ρ(n)-approximation algorithm, where ρ(n) is related to the size of the maximum set in F, max{|S| : S ∈ F}, a small constant in some applications.
You can see CLRS for details: about two pages of mathematics, not difficult but more than we need to replicate in these introductory notes.
The main point here is to make you aware that sometimes greedy algorithms work as approximation algorithms, so this is one approach you should consider when faced with a hard problem.
(We already saw a greedy approach proposed under Vertex Cover in the the question of whether we get a tighter approximation if we choose an edge incident on the highest degree vertex remaining. You can verify with the example given that some improvement is possible but is not guaranteed.)
The approximation ratio ρ(n) of a randomized algorithm is based on its expected cost C. Otherwise the definition is the same.
A randomized algorithm that achieves an expected cost within a factor ρ(n) of the optimal cost C* is called a randomized ρ(n)-approximation algorithm. Here is an example.
Recall that 3-CNF-SAT (Topic 24) asks whether a boolean formula in 3-conjunctive normal form (3-CNF) is satisfiable by an assignment of truth values to the variables.
The Max-3-CNF variation is an optimization problem that seeks to maximize the number of conjunctive clauses evaluating to 1. We assume that no clause contains both a variable and its negation. (This restriction can be lifted, but it complicates the proof below.)
Amazingly, a purely random solution is expected to be pretty good! This is one case where you need to read the proof to believe it!
Theorem: The randomized algorithm that independently sets each variable of MAX-3-CNF to 1 with probability 1/2 and to 0 with probabilty 1/2 is a randomized 8/7-approximation algorithm.
Proof: Given a MAX-3-CNF instance with n variables x1 ... xn and m clauses, set each variable randomly to either 0 or 1 with probability 1/2 in each case. Define the indicator random variable (Topic 5):
Yi = I{clause i is satisfied}.
A clause is only unsatisfied if all three literals are 0, so Pr{clause i is not satisfied} = (1/2)3 = 1/8. Thus, Pr{clause i is satisfied} = 7/8. By an important lemma from Topic 5, E[Yi] = 7/8.
Let Y = Σ Y1 ... Ym be the number of clauses satisified overall. Then we can find E[Y], the expected number of clauses satisfied, by taking the expecation of both sides of this definitional equation and solving using the usual methods (Topic 5):
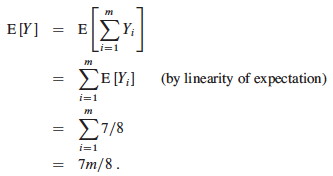
Since m is the upper bound C* on the number of satisfied clauses, the approximation ratio C* / C is
m / (7m/8) = 8/7.
This is just an example: randomization can be applied to many different problems − but don't always expect it to work out so well!
Sometimes we can "relax" a problem to make it amenable to linear programming. (Linear Programming was covered in Topic 21. We may not have covered it this semester, but you can still understand the following: a linear program specifies an expression to minimize subject to constraints expressed as linear equations.) For example ...
In the minimum-weight vertex-cover problem, we are given an undirected graph G = (V, E), and a weight function w(v) ≥ 0 for v ∈ V. We define the weight of a vertex cover V′ to be Σv∈V′ w(v) and seek to find a vertex cover of minimum weight.
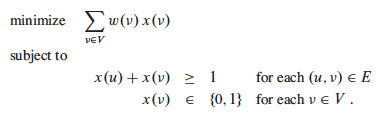
Let each vertex v ∈ V be associated with a variable x(v), which is 1 iff v in the vertex cover and 0 otherwise.
Since any edge (u, v) must be covered, x(u) + x(v) ≥ 1 (their sum is either 1 or 2, as at least one must be included). This leads to the NP-Hard 0-1 integer linear program:
Now let's "relax" the formulation to allow x(v) to range over 0 ≤ x(v) ≤ 1. Then the problem can be written as this linear programming relaxation with a tractable solution:
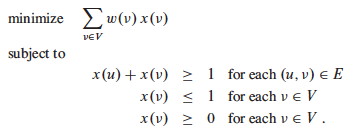
Since a solution to the 0-1 integer version of the problem is a legal solution to the relaxed version of the problem, the value of an optimal solution to this latter relaxed program gives a lower bound on the value of an optimal solution to the 0-1 integer problem.
The solution to the relaxed linear program can be converted to an approximation of the integer linear program with this algorithm:
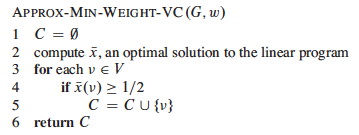
This procedure essentially "rounds" the fractional values to 0 or 1.
Theorem: Approx-Min-Weight-VC is a polynomial 2-approximation algorithm for the mimimum-weight vertex-cover problem.
Proof: There is a polynomial time algorithm for linear programming (line 2), and lines 3-5 are also polynomial in time. So, Approx-Min-Weight-VC is polynomial.
The result must be a vertex cover, since for any edge (u, v) the constraint x(u) + x(v) ≥ 1 implies that at least one of the vertices must have a value of 1/2, so is included in the vertex cover by lines 4-5 of the algorithm, thereby covering the edge.
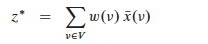
To show 2-approximation, let C* be an optimal solution and let z* be the value of the solution to the relaxed linear program shown above.
An optimal solution C* must be a feasible solution to the relaxed linear program for which z* is an optimal solution, so z* cannot be any worse than C*:
z* ≤ w(C*)
We've already established that every edge is covered. We bound the weight of this cover from above by transforming the value of the optimal solution to the relaxed problem. First we start with the fact that z* is by definition the solution to the relaxed linear programming problem:
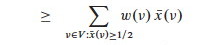
Now we restrict our consideration to vertices that were included in the final solution by Approx-Min-Weight-VC, i.e., those with value ≥ 1/2 (see below the Σ), making the new summation a lower bound on z*, hence ≥:
Since we know that each x-bar(v) term is at least 1/2, we can simplify the expression (further lowering the lower bound) by replacing with 1/2:
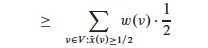
But this is summing over exactly those vertices in the constructed cover C, so we simplify the summation expression to be over C, and then from there it is basic algebra to the solution (the sum of the weights w(v) in the cover being the weight of the cover):
So, w(C) ≤ 2 z*. This result with the prior result of z* ≤ w(C*) gives:
w(C) ≤ 2z* ≤ 2w(C*)
That is, w(C) ≤ 2w(C*), so we have 2-approximation.
It is worth reading the other examples in the text.
Section 35.5 uses the Subset Sum problem to show how an exponential but optimal algorithm can be transformed into a fully polynomial time approximation scheme, meaning that we can give the algorithm a parameter specifying the desired approximation ratio.
Many more examples are suggested in the problem set for the chapter.
Faced with an NP Hard optimization problem, your options include: